Car Physics - Model 1: Longitudinal Point Mass
Table of Content
Block
- Main reference: Marco Monster’s Car Physics
- Github repo for Longitudinal Simulators: duy-phamduc68/Longitudinal-Car-Physics
- Github repo for Simulator 6: duy-phamduc68/Planar-Kinematic-Car-Model
- Github repo for Planar Dynamic Simulator(s): duy-phamduc68/Planar-Dynamic-Car-Model
Roadmap
Block
- Model 1: Longitudinal Point Mass (1D)
- Straight Line Physics
- Magic Constants
- Braking
- Model 2: Load Transfer Without Traction Limits (1D)
- Weight Transfer
- Model 3: Engine Torque + Gearing without Slip (1D)
- Engine Force
- Gear Ratios
- Drive Wheel Acceleration (simplified)
- Model 4: Wheel Rotational Dynamics (1D)
- Drive Wheel Acceleration (full)
- Torque on the Drive Wheel & The Chicken and The Egg
- Model 5: Slip Ratio + Traction Curve (1D)
- Slip Ratio & Traction Force
- Model 6: Low-Speed Kinematic Turning (2D)
- Curves (low speed)
- Model 7: High-Speed Lateral Tire Model (2D)
- High Speed Turning
- Model 8: Full Coupled Tire Model (2D)
Prologue
So recently after my new project TrafficLab 3D, beside my new found interest for simulation and digital twins, I’ve also got more into utilizing those environments themselves for something like autonomous driving. Moreover, I also sign up for a differential equations course this semester, so I thought might as well.
I’ve already scout what’s possible and pre-existing implementations, some cool stuff I found are:
All is cool and all, but my end goal with this project is actually something like jongallant/CarSimulator. It seems simple enough, but also relevant to my current direction, particularly it resonates with my long-term goal of TrafficLab 3D (validating errors) and my new found interest for self-driving. Honestly, I was a bit worried that I might be doing less “AI” by taking up this project, but honestly, for self-driving car, most often time physics should come first before AI.
Anyway, jongallant/CarSimulator reference the Marco Monster’s Car Physics guide heavily, after reviewing both of them thoroughly, I find this challenge worthy to be tackled and eventually put on my portfolio. I plan to approach it from an educational standpoint first, which is why I’ve devise an 8 model roadmap, until I can achieve a complete implementation close to the one from jongallant. In this post, we will be deriving the very first model in the road map: Model 1: Longitudinal Point Mass (1D). I will assume a lot from the guide a lot so do have it on another tab or something.
A. Continuous Math Derivation
1. States
- $x(t) \geq 0$ : Position of the car. Meters (m).
- $v(t) = \frac{dx}{dt}$ : Velocity or the car. Meters per second (m/s).
- $a(t) = \frac{dv}{dt}$ : Acceleration of the car. Meters per second squared (m/s2).
2. Mental Model
1D line, side profile of the car visible.
3. Forces
3.1. Traction
Block
Where:
- $u(t) \in [0,1]$ - Analog input.
3.2. Resistance
Block
Where:
- $F_{\text{rr}}$ : Rolling resistance (simplified - tires <-> road).
- $F_{\text{drag}}$ : Air resistance, a.k.a. aerodynamic drag (air <-> vehicle).
Magic constants:
Block
Where:
- $C_d$ : Coefficient of friction, determined from wind tunnel tests. Here approximated to 0.30 reference for a Corvette.
- $A$ : Frontal area of the car, approx 2.2m2 here.
- $\rho = 1.29$ kg/m3 : Air density.
Block
Very approximated.
3.3. Braking
Assumed a binary handbrake: $B(t) \in \{0, 1\}$.
Block
3.4. Total (master ODE)
Remember Newton’s 2nd law: $ a = \frac{F}{m} $.
Block
4. Constraint
For this model, we put this constraint for simplicity and preventing the car from going backwards:
Block
it basically mean we can only accelerate, cruse, decelerate to stop, or hard stop, but we can’t go backwards, this might seem a pretty silly restriction, for video games, yeah its pretty silly, but I plan that we will approach going in reverse once we get to Model 3: Engine Torque + Gearing without Slip (1D), where we have an actual gear for going in reverse.
5. Exploring the model
Now that we have our Master ODE (ordinary differential equations), let’s interrogate it. In this section, we’ll translate the math back into driving experiences.
5.1 The force balance dashboard
The heart of Model 1 is the battle between propulsion and resistance. This dashboard lets you see that battle in real-time.
Note: these are just dummy stats, not from any real car:
M = 1500 # kg
F_ENGINE_MAX = 3000 # N
C_RR = 13.0 # kg/s
C_DRAG = 0.43 # kg/m
C_BRAKING = 12000 # N
Key insight: Reading equilibrium
The most important feature of this plot is the intersection point:
-
Top speed occurs where
Engine Force = Resistance Force. - (i.e., where the Net Force line crosses zero)
Here are some intuitions you might want to walkthrough:
| Action | Intuition | What Actually Happens |
|---|---|---|
| Reduce throttle to 0.5 | Engine line drops → top speed decreases | The intersection point shifts left |
| Toggle Hard Brake | Net force becomes negative at all speeds | Red line drops below zero; car decelerates everywhere |
| Set throttle=0, brake=0 | Net force = -Resistance (always negative) | Car always coasts to a stop |
Mathematically, this is solving:
Block
You can solve this quadratic analytically (see Section 5.3), but the plot gives you an instant visual answer. Drag the throttle slider and watch the equilibrium point slide along the velocity axis.
On the same note, you can just see how simplified the braking here is. In reality, neither the handbrake nor the footbrake is binary, but instead analog. Also, a real car takes much longer to decelerate if you don’t plan for it, if you are zooming at top speed (in the dashboard above, say 70m/s $\approx$ 252km/h), don’t expect the car to stop sub-second or even in 2-3 seconds irl. This will be partially address in Model 2: Load Transfer Without Traction Limits (1D).
5.2 Scenario walkthroughs
The Master ODE is a compact statement, but it encodes many scenario in of itself. In this section, we’ll simulate specific scenarios and watch how the equation responds.
Block!Tips: Keep the Dashboard Open: Open Section 5.1 in another tab. We’ll reference it constantly.
- Scenario 1: The Launch (Full Throttle from Stop)
| Aspect | Details |
|---|---|
| Situation | Car at rest ($v=0$). Driver floors the throttle ($u=1$), no brake ($B=0$). |
| Inputs | $u=1$, $B=0$, $v=0$ |
| Dominant Term | $\frac{F_{engine}}{m}$ (Inertia is the only opponent) |
| ODE Says | $\frac{dv}{dt} = \frac{F_{max}}{m} \approx \frac{3000}{1500} = 2.0 \, \text{m/s}^2$ |
| Real-World Feel | “Pushed back in your seat” (maximum acceleration happens right at launch). |
Why? At $v=0$, both resistance terms vanish: The engine fights only mass, not air or friction.
- Scenario 2: The Cruise (Top Speed Equilibrium)
| Aspect | Details |
|---|---|
| Situation | Car at full throttle, has reached constant speed. |
| Inputs | $u=1$, $B=0$, $v = v_{max}$ |
| Dominant Term | Force Balance: $F_{engine} = F_{resist}$ |
| ODE Says | $\frac{dv}{dt} = 0$ (Net force is zero) |
| Real-World Feel | Max speed, but speedometer won’t budge. |
Why? As speed increases, drag ($v^2$) grows rapidly. Eventually: The engine’s forward push is exactly canceled by air + road pushing back.
Analytical Bonus: Solve for $v_{max}$ directly: Plug in our constants: $v_{max} \approx 70 \, \text{m/s} \approx 252 \, \text{km/h}$.
- Scenario 3: The Coast (Lifting Off at Highway Speed)
| Aspect | Details |
|---|---|
| Situation | Car at 30 m/s (108 km/h). Driver releases throttle ($u=0$), no brake. |
| Inputs | $u=0$, $B=0$, $v=30$ |
| Dominant Term | $-C_{drag} v^2$ (Drag dominates at high speed) |
| ODE Says | $\frac{dv}{dt} = -\frac{1}{m}(C_{rr} \cdot 30 + C_{drag} \cdot 30^2) \approx -2.8 \, \text{m/s}^2$ |
| Real-World Feel | Rapid slowdown when you lift off at highway speeds. |
Why? Drag scales with $v^2$. At 30 m/s: They’re comparable here, but drag grows much faster as speed increases.
- Scenario 4: The Creep (Rolling to a Stop)
| Aspect | Details |
|---|---|
| Situation | Car coasting at very low speed ($v \approx 1 \, \text{m/s}$). |
| Inputs | $u=0$, $B=0$, $v=1$ |
| Dominant Term | $-C_{rr} v$ (Rolling resistance dominates at low speed) |
| ODE Says | $\frac{dv}{dt} = -\frac{1}{m}(C_{rr} \cdot 1 + C_{drag} \cdot 1^2) \approx -0.009 \, \text{m/s}^2$ |
| Real-World Feel | The car seems to roll forever when creeping. |
Why? At low $v$, the $v^2$ drag term becomes negligible: Rolling resistance dominates, but it’s small → tiny deceleration.
BlockThe “Infinite Stop” Quirk: Because $F_{resist} \propto v$, as $v \to 0$, force $\to 0$. Mathematically, the car asymptotically approaches zero but never reaches it in finite time. In reality, static friction and our Hard Stop Constraint (Section 4) handle the final halt. We accept this trade-off for mathematical smoothness.
- Scenario 5: The Hard Brake (Emergency Stop)
| Aspect | Details |
|---|---|
| Situation | Car at 30 m/s. Driver slams brakes ($B=1$), no throttle. |
| Inputs | $u=0$, $B=1$, $v=30$ |
| Dominant Term | $-C_{braking}$ (Constant brake force dominates) |
| ODE Says | $\frac{dv}{dt} = -\frac{1}{m}(12000 + 390 + 387) \approx -8.5 \, \text{m/s}^2 \approx 0.87g$ |
| Real-World Feel | Strong, consistent deceleration. |
Why? The brake force ($12,000 \, \text{N}$) dwarfs resistance forces at most speeds. Deceleration is nearly constant until $v$ gets very low.
- Scenario 6: The Hard Stop (At Rest, Holding Brake)
| Aspect | Details |
|---|---|
| Situation | Car stopped ($v=0$), brake held ($B=1$). |
| Inputs | $u=0$, $B=1$, $v=0$ |
| Dominant Term | Constraint Logic (Not the ODE itself) |
| ODE Says | Raw: $\frac{dv}{dt} = 0$. Constraint: “If $v=0$ and force would be negative, clamp to 0.” |
| Real-World Feel | “Car stays put at a stoplight.” |
Why? At $v=0$, braking force is defined as zero (it only opposes motion). The constraint (Section 4) prevents the car from accelerating backward due to any residual negative force.
Quick Reference: Scenario <-> Dominant Term
| Scenario | Speed Range | Dominant Term in ODE | Effect on $\frac{dv}{dt}$ |
|---|---|---|---|
| Launch | $v \approx 0$ | $+F_{engine}/m$ | Large positive acceleration |
| Cruise | $v = v_{max}$ | $F_{engine} = F_{resist}$ | Zero acceleration (equilibrium) |
| Coast (High) | $v > 20 \, \text{m/s}$ | $-C_{drag}v^2/m$ | Strong negative acceleration |
| Coast (Low) | $v < 5 \, \text{m/s}$ | $-C_{rr}v/m$ | Gentle negative acceleration |
| Hard Brake | Any $v > 0$ | $-C_{braking}/m$ | Strong, nearly constant deceleration |
| At Rest | $v = 0$ | Constraint | Zero acceleration (clamped) |
5.3 Derivable quantities
One of the most satisfying aspects of having a formal ODE is that you can calculate exact answers without running a simulation.
In this section, we’ll derive a few key performance metrics directly from the Master ODE:
| Quantity | What It Tells You | Math Tool Required |
|---|---|---|
| Top Speed ($v_{max}$) | Maximum achievable velocity | Algebra (quadratic formula) |
| 0→100 km/h Time | Acceleration performance | Integral $\int \frac{1}{a(v)} dv$ |
| Stopping Distance | Braking performance | Integral $\int \frac{v}{a(v)} dv$ |
BlockWhy This Matters: These formulas let you tune your car analytically. Want a 10% faster top speed? The equations tell you exactly how much to increase engine force or reduce drag.
Derivable 1: Top Speed
The Question: What is the maximum speed achievable at full throttle?
The Insight: At top speed, acceleration is zero ($\frac{dv}{dt} = 0$). The engine force exactly balances resistance.
Derivation:
Block
This is a quadratic equation $ax^2 + bx + c = 0$ with:
- $a = C_{drag}$
- $b = C_{rr}$
- $c = -F_{engine}$
Solution (positive root only, since $v \ge 0$):
Block
Interactive Calculator:
≈ 251 km/h ≈ 156 mph
Key Insight: Top speed depends on the square root of engine force but only linearly on drag reduction.
Derivable 2: 0 to 100 km/h Time
The Question: How long does it take to accelerate from rest to 100 km/h (27.8 m/s)?
The Insight: Time is the integral of “inverse acceleration” over velocity.
Derivation:
Block
The Challenge: This integral has no simple closed form (it involves $\arctan$ or $\ln$ depending on the discriminant). But we can evaluate it numerically for display.
Interactive Visualization:
Numerical integration of $\int_0^{27.8} \frac{m}{F_{net}(v)} dv$
Why Mass Matters Here: Unlike top speed, acceleration time does depend on mass. Heavier cars have smaller $a = F/m$, so the integral takes longer to accumulate. Try This: Double the mass in the code ($m = 3000$). The 0→100 time roughly doubles (not exactly, because resistance forces don’t scale with mass).
Derivable 3: Stopping Distance
The Question: How far does the car travel when braking hard from speed $v_0$ to rest?
The Insight: Use the chain rule trick: $a = v \frac{dv}{dx} \Rightarrow dx = \frac{v}{a(v)} dv$.
Derivation:
Block
Note: The limits flip because we’re integrating from high speed to zero, but distance is positive.
Interactive Calculator:
Numerical integration
Key Insight: Stopping distance scales roughly with $v_0^2$ (because kinetic energy is $\frac{1}{2}mv^2$). Doubling your speed quadruples your stopping distance.
Mass Matters: Unlike top speed, stopping distance increases with mass because $d \propto m$ in the integral. Heavier cars take longer to stop.
Summary: What You Can Calculate Analytically
| Quantity | Formula / Method | Depends on Mass? | Use Case |
|---|---|---|---|
| Top Speed | Quadratic formula | Tuning aerodynamics vs. engine | |
| 0→100 Time | $\int \frac{m}{F_{net}} dv$ (numerical) | Performance benchmarking | |
| Stopping Distance | $\int \frac{mv}{F_{brake}+F_{resist}} dv$ | Safety calculations, AI braking |
B. Code Implementation
Now that we have a solid mental model of the continuous mathematics, we need to bridge the gap to discrete computation.
6. The discretization bridge
6.1. The core problem
Our Master ODE describes instantaneous change:
Block
The term $\frac{dv}{dt}$ is a derivative, it asks: “What is the rate of change at this exact instant?”
Computers cannot compute “instants.” They compute steps. We need to approximate the continuous derivative using discrete time intervals.
6.2. Euler’s Method
The simplest discretization is Forward Euler Integration, if you are familiar with implementing a neural network from scratch, particularly, Gradient Descent in code, then its very similar. Here’s the derivation:
- Step 1: Start with the derivative definition
Block
Where $\Delta t$ (often written as dt) is the time step between updates.
- Step 2: Substitute the ODE
Block
- Step 3: Solve for $v_{new}$
Block
- Step 4: Similarly for position
Block
BlockThe derivative $\frac{dv}{dt}$ becomes a finite difference $\frac{\Delta v}{\Delta t}$. We’re approximating the slope over a tiny interval instead of at an exact point.
6.3. Choosing timestep
The timestep is a trade-off between accuracy and performance:
| Timestep | Accuracy | Performance | Use Case |
|---|---|---|---|
dt = 0.001 (1 ms) |
Excellent | Expensive (1000 updates/sec) | High-fidelity simulation |
dt = 0.01 (10 ms) |
Good | Reasonable (100 updates/sec) | Most games |
dt = 0.016 (60 Hz) |
Acceptable | Cheap (60 updates/sec) | Tied to frame rate |
dt = 0.1 (100 ms) |
Poor | Very cheap | Turn-based, low precision |
6.4. The Core discrete update function (Pseudocode)
Here’s the Master ODE translated into discrete steps:
# === CONSTANTS (from Model 1) ===
M = 1500 # kg
F_ENGINE_MAX = 3000 # N
C_RR = 13.0 # kg/s
C_DRAG = 0.43 # kg/m
C_BRAKING = 12000 # N
class CarModel:
def __init__(self):
# === STATE ===
self.x = 0.0 # position (m)
self.v = 0.0 # velocity (m/s)
def update(self, dt, u, B):
"""
dt : timestep (seconds)
u : throttle [0, 1]
B : brake [0, 1] (binary)
"""
# 1. Calculate Forces
F_engine = u * F_ENGINE_MAX
F_rr = C_RR * self.v
F_drag = C_DRAG * self.v * abs(self.v)
F_brake = C_BRAKING if (self.v > 0 and B == 1) else 0
# 2. Net Force
F_net = F_engine - F_rr - F_drag - F_brake
# 3. Acceleration (Newton's 2nd Law)
a = F_net / M
# 4. Integrate Velocity
self.v = self.v + dt * a
# 5. Apply Hard Stop Constraint
if self.v < 0:
self.v = 0
# 6. Integrate Position
self.x = self.x + dt * self.v
6.5. Side-by-Side: continuous vs. discrete
| Continuous (ODE) | Discrete (Code) |
|---|---|
| $\frac{dv}{dt} = \frac{1}{m} F_{net}$ | v = v + dt * (F_net / m) |
| $\frac{dx}{dt} = v$ | x = x + dt * v |
| $v(t)$ is a function |
v is a variable (state) |
| Time is continuous | Time advances by dt each step |
| Exact solution | Approximate solution |
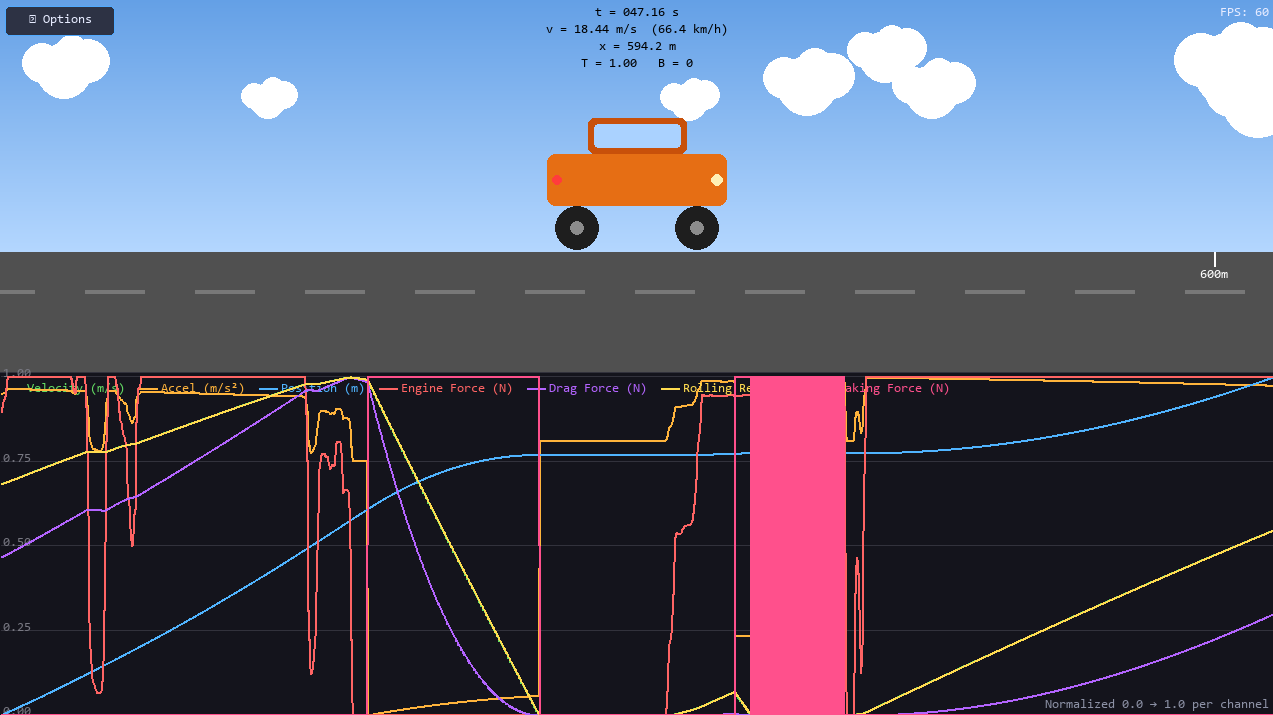
7. Simulator
Now after all of that, I built a simulator in Python for Model 1, you can check out the code at duy-phamduc68/Longitudinal-Car-Physics.
C. Final Takeaways
This section wraps up Model 1: Longitudinal Point Mass (1D) with a concise recap of what we built, what it can (and can’t) do, and where we’re heading next.
The Master ODE (Continuous Math)
Block
Subject to constraint: If $v = 0$ and $\frac{dv}{dt} < 0$, then $\frac{dv}{dt} = 0$.
| Symbol | Meaning | Assumed Value |
|---|---|---|
| $m$ | Vehicle mass | 1500 kg |
| $u$ | Throttle input | [0, 1] |
| $B$ | Brake input | {0, 1} |
| $C_{rr}$ | Rolling resistance | 13.0 kg/s |
| $C_{drag}$ | Aerodynamic drag | 0.43 kg/m |
| $C_{braking}$ | Braking force | 12000 N |
The Core update function
# === CONSTANTS (from Model 1) ===
M = 1500 # kg
F_ENGINE_MAX = 3000 # N
C_RR = 13.0 # kg/s
C_DRAG = 0.43 # kg/m
C_BRAKING = 12000 # N
class CarModel:
def __init__(self):
# === STATE ===
self.x = 0.0 # position (m)
self.v = 0.0 # velocity (m/s)
def update(self, dt, u, B):
"""
dt : timestep (seconds)
u : throttle [0, 1]
B : brake [0, 1] (binary)
"""
# 1. Calculate Forces
F_engine = u * F_ENGINE_MAX
F_rr = C_RR * self.v
F_drag = C_DRAG * self.v * abs(self.v)
F_brake = C_BRAKING if (self.v > 0 and B == 1) else 0
# 2. Net Force
F_net = F_engine - F_rr - F_drag - F_brake
# 3. Acceleration (Newton's 2nd Law)
a = F_net / M
# 4. Integrate Velocity
self.v = self.v + dt * a
# 5. Apply Hard Stop Constraint
if self.v < 0:
self.v = 0
# 6. Integrate Position
self.x = self.x + dt * self.v
8. What Model 1 CAN Do
| Capability | Description |
|---|---|
| Straight-line acceleration | Simulates 0 $\rightarrow$ 100 km/h, quarter-mile |
| Top speed prediction | Calculates equilibrium speed analytically |
| Braking simulation | Models hard stops with constant brake force |
| Coasting behavior | Natural deceleration from drag + rolling resistance |
| Parameter sensitivity | Shows how changes to $C_{drag}$, $m$, etc. affect performance |
9. What Model 1 CAN’T Do
| Limitation | Why It Matters | Fixed In |
|---|---|---|
| No turning | Car is a point mass on a line, no lateral forces | Model 6–8 |
| No load transfer | Braking doesn’t shift weight to front wheels | Model 2 (next) |
| No traction limits | Engine force is unlimited, no wheel spin | Model 5 |
| No engine torque curve | Force is constant, not RPM-dependent | Model 3 |
| No wheel rotation | Wheels don’t have inertia or slip | Model 4 |
| No reverse gear | Car can’t go backward yet | Model 3 |
| Simplified rolling resistance | Linear ($v$) instead of constant | Future refinement |
If it helps, model 1 behaves more like a rocket or a boat than an actual car. Whats more, the car in the simulator is a lie, this model act as if its a single point, with mass, acted upon by forces, in a 1D environment, hence, “Longitudinal Point Mass”.
If you spot any mistake or have any suggestions, please let me know! See you in Model 2: Load Transfer Without Traction Limits (1D) :).